As you may remind (maybe not ;-) ) we had not so much success in our can-bus experiments. The Vectra bus details are near totally unknown (at least for us), and we can't ever debug our interface, and this sense of vagueness is very frustrating. We felt like a blind man in a sandstorm.
To minimize this effect we try to build a cornerstone, developing a working can-bus scanner, replicating our interface. But the results are describend in the last post. So we have intensified our efforts in this direction. And finally...
IT WORKS! :D

We have successfully connected two PIC18F4682 with a Can-bus, at a speed of 95kbit, which should be the speed of MScan of Vectra. We checked communications, message type, payload etc. All work now. We implemented a progressive encoded (well... take it easy...) message passing to check that the messages we were exchanging were really the ones we espected.
.jpg) This step should give us a good starting point for interfacing: the receive() function works for sure, now we can do a functional sniff routine.
This step should give us a good starting point for interfacing: the receive() function works for sure, now we can do a functional sniff routine.The quest now is: will we find the right bus speed?




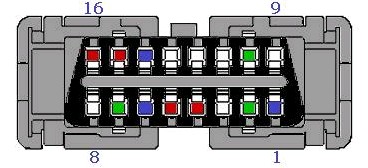
.jpg) some ruffled wires were connected to the EODB port. This is not really the first time that we interface our circuit to the car, but the last try was a failure. After some changes (both in code and wires) we do it again.
some ruffled wires were connected to the EODB port. This is not really the first time that we interface our circuit to the car, but the last try was a failure. After some changes (both in code and wires) we do it again. That's all folks! We will be back as soon as possible, to continue this first part of the project. Stay tuned!
That's all folks! We will be back as soon as possible, to continue this first part of the project. Stay tuned!